Create Your First Project
Start adding your projects to your portfolio. Click on "Manage Projects" to get started


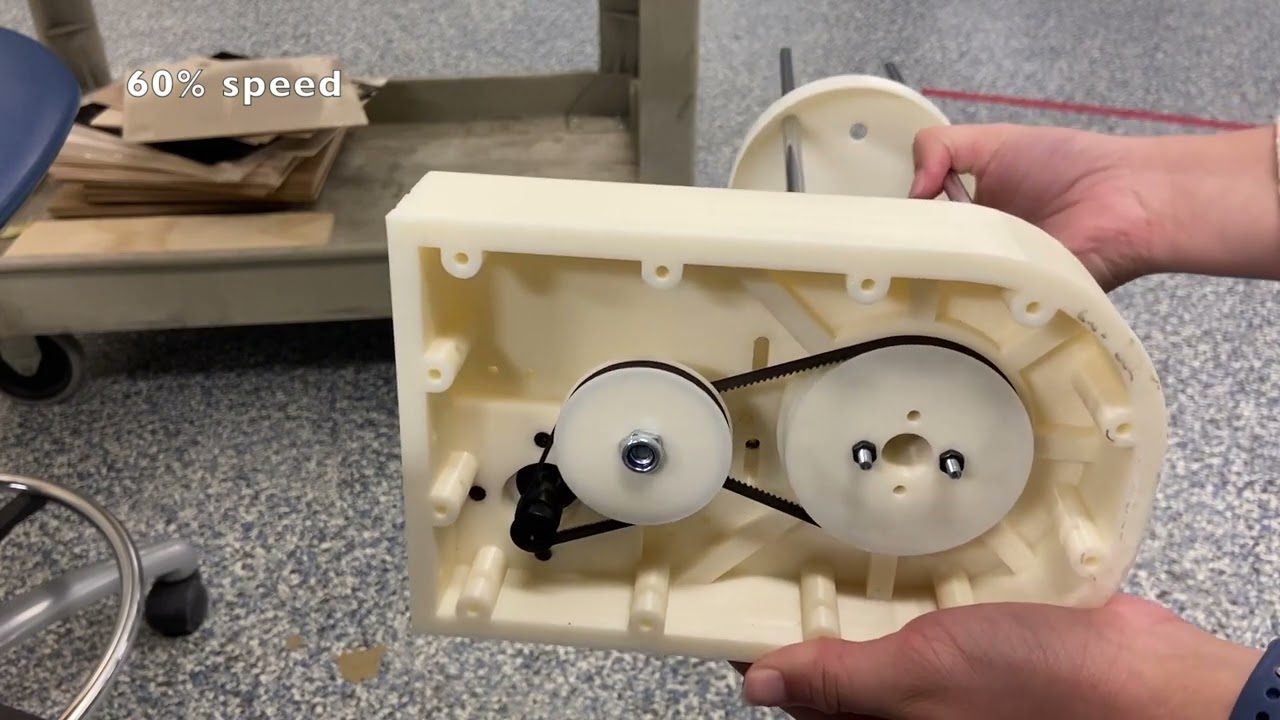
Augmenting and Programming a SCARA Robot
Project type
Course Project
Date
Spring 2023
Location
Notre Dame, IN
For my Automation and Controls final project, my lab partner and I adapted and fabricated an open-source SCARA robot design to deal cards. I extended the link lengths of the arms, created a custom MATLAB-Arduino GUI interface for inverse kinematics waypoint programming, and incorporated an electronically-controlled vacuum suction cup as an end effector.
An Arduino MEGA, CNC shield (and four NEMA stepper motors), and series of limit switches allowed the robot to perform a homing procedure, and then begin dealing cards from a box to its left (as can be seen in the link video presentation). The robot is pre-programmed with waypoints using the custom MATLAB-Arduino interface and Prof. Kevin Lynch's (Northwestern University) "Modern Robotics" MATLAB IK functions, and deals cards in different positions and orientations in the task space (a lab cart in this use).